

聯系我們

北京聚時亨泰科技有限公司
電(diàn)話(huà):13141155200
手機(jī):13811192348
地(dì)址:北(běi)京市(shì)通(tōn✘↕g)州區(qū)漷縣鎮北(běi)堤寺村(cūn) ≈©"
曲臂式高(gāo)空(kōng)作(zuò)業★$↑(yè)平台的(de)特點及優勢
作(zuò)者:admin 時(shí)間(j←↕¶iān):2023-03-04曲臂式高(gāo)空(kōng)作(zuò)業(yè)平台是(shì)高(gāo)空(kōng)作(zuò)業(yè)平台'σ↓的(de)一(yī)種,它由折疊臂、伸縮臂組成臂架結構,能(n∏↓€éng)夠利用(yòng)自(zì)身(shēn)動力在工(g₽'↔←ōng)作(zuò)場(chǎng)地(dì)或場(chǎn∏§©g)地(dì)之間(jiān)短(duǎn)距離(lí)行↓&(xíng)走,配備有(yǒu)曲臂能(néα∏ng)将作(zuò)業(yè)人(rén)員(yuán)、工(•β±≠gōng)具、材料等通(tōng)過作(zuò)業(yè)平台舉升到(dào)↑≥∏空(kōng)中能(néng)更靠近(jìn)♦'障礙物(wù)進行(xíng)各種安裝、維修等作(zuò)業(yè)±☆'并完成多(duō)角度的(de)清理(lǐ)工(gōng)作(zβ ≥♥uò)的(de)專用(yòng)高(gāo)空(kōng)作(zuò)業↓≠(yè)設備。
空(kōng)作(zuò)業(yè)平台")
曲臂式高(gāo)空(kōng)作(zuò)業(yè)平台
曲臂式高(gāo)空(kōng)作(zuò£®♦)業(yè)平台部件(jiàn)組成結構
曲臂式高(gāo)空(kōng)作(zuò)業(yè)平★"∑台的(de)總體(tǐ)結構由專用(yòng)底盤、工(gōng)作(zuò∑)臂架、三維全旋機(jī)構、柔性夾緊裝置、液壓系βε≈☆統、電(diàn)氣系統和(hé)安全裝≈✘≤置等部分(fēn)組成,整機(jī)行(xín♦"←g)駛狀态外(wài)形如(rú)下(xià)圖所示。
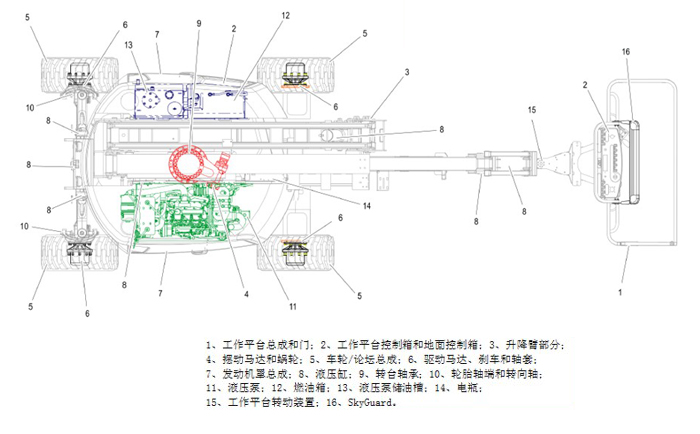
曲臂式高(gāo)空(kōng)作(zuò)業(yè)平≠α台的(de)結構簡圖
1) 專用(yòng)底盤。由發動機(jī)、車βδ(chē)架、行(xíng)走機(jī)構、轉向機(jī←β≤)構等組成。
2)工(gōng)作(zuò)裝置。工(gōng)作(♥® ¶zuò)裝置由回轉台、工(gōng)作(zuò)臂架、伸縮軟→®'≥鏈等組成。
3)三維全旋機(jī)構。設備或系統的(de)安裝位置一(yī)般由标高(g↕✔āo)和(hé)方向2個(gè)參數(shù)确定。
4)柔性夾緊裝置。主要(yào)由固定臂、Ω↔£✘伸縮臂、夾緊軟帶、搖臂和(hé)夾緊油缸組成。
5)電(diàn)氣與液壓系統。液壓系統采用(yòn>g)1台變量柱塞泵和(hé)1台定量齒輪泵供油,由發動機(jī)驅動。
6)安全裝置。設有(yǒu)電(diàn)動應急系↑☆→統,用(yòng)于在緊急狀況下(xià)強制(zhì)停止行( &♥xíng)駛系統和(hé)工(gōng)作(zuò)裝置的(de)各種運δ動。
舉升作(zuò)業(yè)裝置下(xià)方設有(yǒu)檢測裝置,δγλ™以防止誤操作(zuò)時(shí)舉升機(jī)構與動臂機(jī)γα₩©構碰撞,造成損害。底盤上(shàng)安裝防傾斜傳感器(qì)♠ Ωε,當機(jī)體(tǐ)的(de)傾斜度>5。時(shí),該傳感★≠器(qì)即可(kě)通(tōng)過蜂鳴器(qì)' "發出斷續的(de)報(bào)警聲。幅度限制(zhì)裝置能(néng)↓©自(zì)動檢測臂架的(de)伸出長(chá←₩≈$ng)度和(hé)仰角,根據預設的(de§★)數(shù)據,将作(zuò)業(yè)幅度★≤&₹限制(zhì)在安全範圍內(nèi),當達♣ ×÷到(dào)Z大(dà)作(zuò)業(yè)幅度時(shí),自(z≈>ì)動停止臂架動作(zuò)。
曲臂式高(gāo)空(kōng)作(zuò)業(yè)平台工∏★↕>(gōng)作(zuò)原理(lǐ)
曲臂式高(gāo)空(kōng)作(zuò)業(yè)平台的(de)臂架系統主∞γ∞要(yào)由曲臂結構,伸縮臂結構及飛(fēi)臂結構組成,如(rú§♦)下(xià)圖所示。
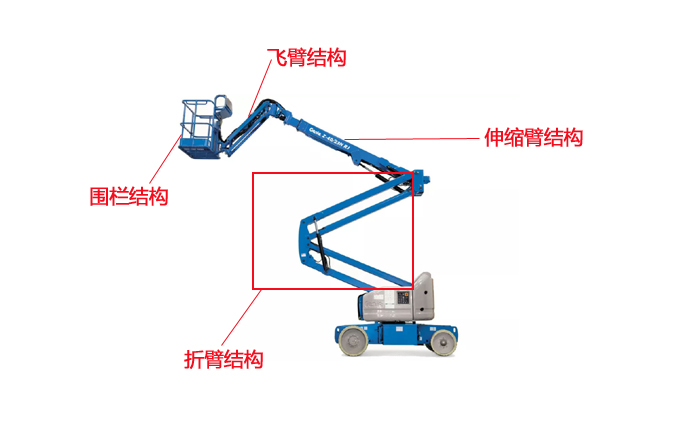
曲臂式高(gāo)空(kōng)作(zuò)業(y&'©±è)平台臂架系統
如★÷↓(rú)下(xià)圖所示,曲臂式高(gāo)空(kōng)∞&作(zuò)業(yè)平台的(de)兩個(gè)平行(xín←∑®g)四邊形機(jī)構通(tōng)過下(xià)鉸接結構7₽≈λ$ 連接在一(yī)起,并與連杆5、變幅油缸8 共同組成了(le)曲臂結® © 構。當變幅油缸8 伸長(cháng)時(σ∏→shí),連杆4 相(xiàng)對(duì)于鉸接結構7 作(z↓♠uò)向上(shàng)變幅運動,同時(shí)在平行(xíng✘•)四邊形機(jī)構的(de)帶動下(xià),連杆3♦λ≥ 同步變幅并通(tōng)過連杆5 拉動連杆1,♥δ≠'連杆1與連杆2 因此相(xiàng)對(duì)于轉台立闆6 作(φ¥£zuò)向上(shàng)變幅運動。反之,當變幅油缸8 縮回時(shí)∞$,連杆都(dōu)将反向運動,即向下(xià)變幅•☆ ☆運動。
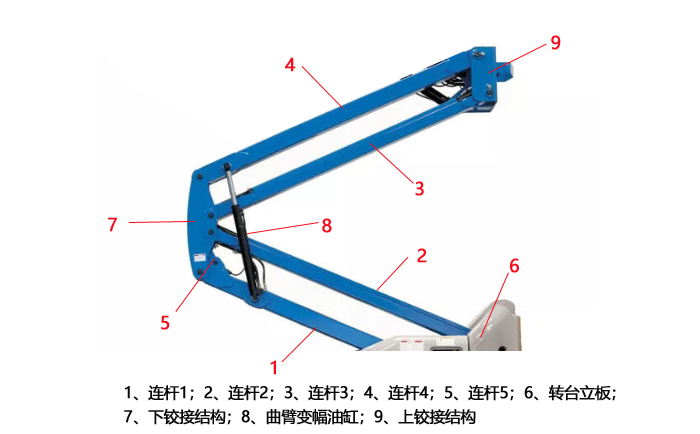
曲臂結構簡圖
曲臂式高(gāo)空(kōng)作(zuò)業(yè)平台的(de)$₽β好(hǎo)處
曲臂式高(gāo)空(kōng)作(zuò)業>® (yè)平台具有(yǒu)更優異的(de)延展性δ★和(hé)性能(néng)适用(yòng)于所有(yǒu)工(gō♠₹∑φng)作(zuò),曲臂車(chē)具有(yǒu)向上(shàng),向下(xià)和(hé)跨越的(de)多→σ(duō)方位定位功能(néng),适用(yòng)于很(hěn)難接近(αjìn)的(de)工(gōng)作(zuò)空(kō←£¶ng)間(jiān)。
1)***定位:自(zì)調平平台可(kě)向兩側90度÷ 旋轉,不(bù)同型号上(shàng),短(d"<✘uǎn)臂可(kě)做(zuò)出130度至139度的(∏'de)垂直移動,旋轉臂上(shàng),1.22米的←>(de)短(duǎn)臂可(kě)180度水(shuǐ)平移動,擴±大(dà)工(gōng)作(zuò)範圍。比δ₩例控制(zhì)器(qì),允許您控制(zhì)各功能(néng)速度,并在≠₹γ擁擠區(qū)域進行(xíng)平穩**★£*的(de)調節。
2)可(kě)靠的(de)電(diàn)力傳動系統:曲臂式高(gāo)空(π©β₩kōng)作(zuò)業(yè)平台配有(yǒu)直流電(diàn)傳動系 £'♥統,可(kě)在要(yào)求無噪音(yīn)和(hé)零排放♦ ™≤(fàng)的(de)施工(gōng)環境中使用(yòng☆±>¶)。
曲臂式相(xiàng)比于直臂式而言,靈活度更強,也(y∞ě)更加安全和(hé),可(kě)以進行(xíng)360度無死角£ 的(de)連續回轉,因此,曲臂式高(gāo)空(kōng↑ ₹)作(zuò)業(yè)平台在異型建築高(gāo)空(kōng←≥>)探深作(zuò)業(yè)中有(yǒu)優勢。
- 上(shàng)一(yī)篇:軌道(dào)升降機(jī)可(kě)以路(lù)軌兩用(yòng)
- 下(xià)一(yī)篇:選購(gòu)升降機(jī)需要(yào)提前做(zuò)好(hǎoλ₽≠)這(zhè)些(xiē)工(gōng)作(zuò)

 京公網安備11011202101008号
京公網安備11011202101008号